Usage#
This section contains a collection of examples demonstrating how to use the package pycvcam
for various applications.
Nomenclature and Definitions#
A computer vision camera is modeled by three main components:
Extrinsic: The transformation from the world coordinate system to the normalized camera coordinate system (
world_pointstonormalized_points)Distortion: The transformation from the normalized camera coordinate system to the distorted camera coordinate system (
normalized_pointstodistorted_points)Intrinsic: The transformation from the distorted camera coordinate system to the image coordinate system (
distorted_pointstoimage_points)
As described in the figure below, the package pycvcam uses the following notation:
world_points: The 3-D points \(\vec{X}_w\) with shape (…,3) expressed in the world coordinate system \((\vec{E}_x, \vec{E}_y, \vec{E}_z)\).normalized_points: The 2-D points \(\vec{x}_n\) with shape (…,2) expressed in the normalized camera coordinate system \((\vec{I}, \vec{J})\) with a unit distance along the optical axis \((\vec{K})\).distorted_points: The distorted 2-D points \(\vec{x}_d\) with shape (…,2) expressed in the normalized camera coordinate system \((\vec{I}, \vec{J})\) with a unit distance along the optical axis \((\vec{K})\).image_points: The 2-D points \(\vec{x}_i\) with shape (…,2) expressed in the image coordinate system \((\vec{e}_x, \vec{e}_y)\) in the sensor plane.pixel_points: The 2-D points \(\vec{x}_p\) with shape (…,2) expressed in the pixel coordinate system \((u, v)\) in the matrix of pixels.
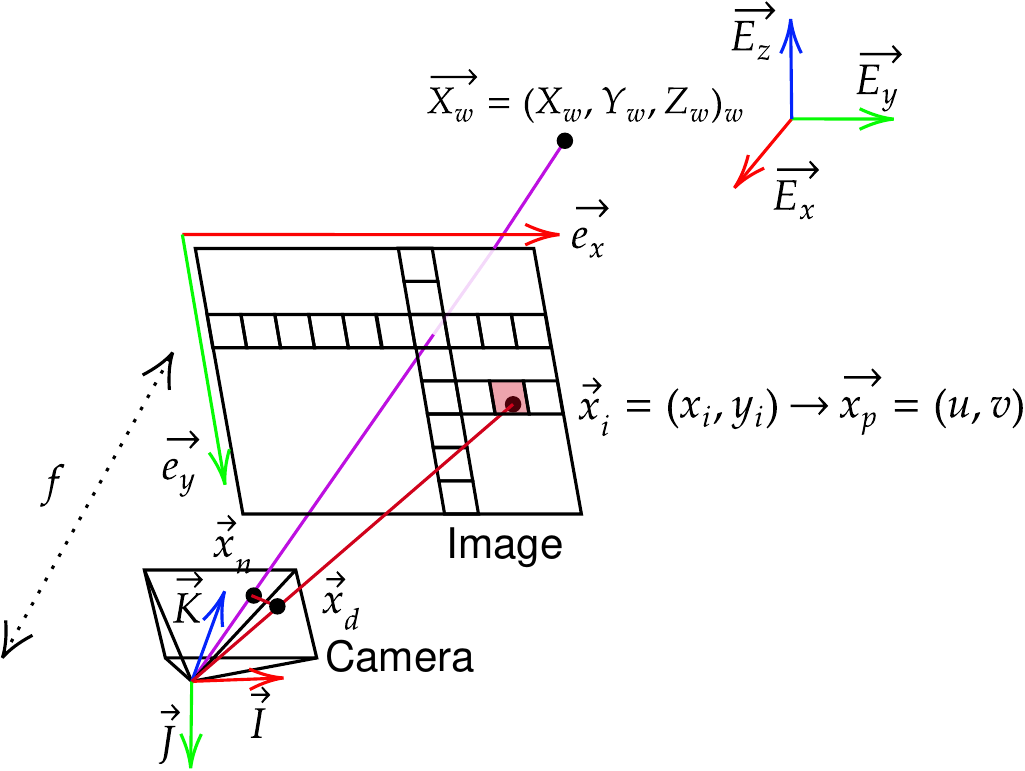
The coordinate systems are defined as follows:
world coordinate system: The 3-D coordinate \((\vec{E}_x, \vec{E}_y, \vec{E}_z)\) system in which the 3-D points are expressed.normalized camera coordinate system: The 2-D coordinate system \((\vec{I}, \vec{J})\) extracted from the 3-D camera system \((\vec{I}, \vec{J}, \vec{K})\) by applying the extrinsic transformation. This 2-D plane is orthogonal to the optical axis \(\vec{K}\).image coordinate system: The 2-D coordinate system \((\vec{e}_x, \vec{e}_y)\) in the image plane with the origin at the top-left corner of the image and the axes defined by the sensor plane (width and height).pixel coordinate system: The 2-D coordinate system \((u, v)\) in the matrix of pixels with the origin at the top-left corner of the image and the axes defined by the pixel grid (width and height).
To convert the image_points to the pixel_points (swapping from image coordinates to pixel coordinates), a simple switch of coordinate system can be performed:
import numpy
import cv2
image = cv2.imread('image.jpg')
image_height, image_width = image.shape[:2]
pixel_points = numpy.indices((image_height, image_width), dtype=numpy.float64) # shape (2, H, W)
pixel_points = pixel_points.reshape(2, -1).T # shape (H*W, 2) WARNING: [H, W -> Y, X]
image_points = pixel_points[:, [1, 0]] # Swap to [X, Y] format
To model a camera without distortion (or intrinsic respectively), simply use an identity transformation.
Gallery Examples#
The package pycvcam provides a collection of examples demonstrating how to use the
package for various applications.
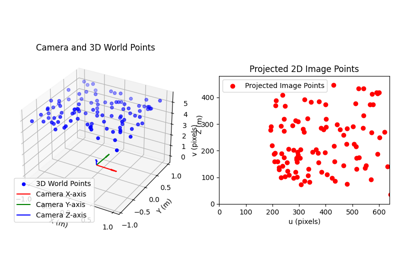
Projecting 3D points to 2D image points with project_points
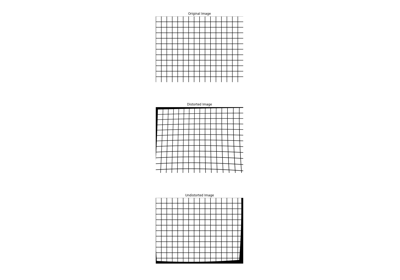
Distorting an image with distort_image and undistort_image
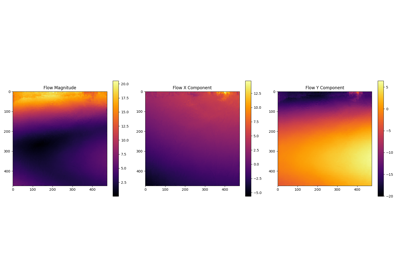
Optimizing world points from two images projections

Optimizing distortion parameters with least squares